-
1 модуль высокого уровня
Большой англо-русский и русско-английский словарь > модуль высокого уровня
-
2 top module
expansion module — модуль расширения; расширительный модуль
-
3 top
1. n верхушка; вершина; макушка2. n верхняя часть, верхний конец3. n шпиль; купол; шатёр4. n верхняя поверхностьthe top of a table — столешница, крышка стола
5. n темя6. n голова7. n диал. пучок8. n диал. волосы9. n высшая степень, высшая ступеньtop out — достигать высшего уровня, высшей точки
top flight — высший уровень или класс, экстракласс
10. n высший ранг, высокое положение; первое место11. n лучшая, отборная часть12. n начало, ранний этап13. n l14. n отвороты15. n высокие сапоги с отворотами16. n обыкн. бот. ботва17. n обыкн. бот. перо18. n карт. туз или король19. n карт. горн. кровля20. n карт. мор. марс; топ21. n карт. хим. лёгкие фракции, дистилляты22. n карт. физ. звуки верхних частот23. n карт. удар по мячу выше центраfrom top downward — сверху вниз; с головы до пят
to be at the top of the tree — быть во главе ; занимать видное положение
to come to the top — отличиться, добиться успеха
24. a верхнийtop milk — молоко со сливками; сливки
25. a высший, максимальный; предельный; последнийto be in top form — быть в прекрасной форме, достичь пика формы
top scorer — спортсмен, набравший высшую сумму баллов
26. a самый главный, самый важный; высший; высокопоставленныйtop management — высшее руководство, верхушка управляющих
27. a лучший, первый, ведущий28. a престижный, привилегированный29. v снабжать верхушкой; покрыватьtop of stack — вершина стека; верхушка стека
30. v срезать верхушкуto top and tail — срезать оба конца, срезать черенок и хвостик
31. v перевалить; перепрыгнуть32. v быть завершением; увенчивать, возвышаться33. v быть во главе; стоять на первом местеto top the list — быть первым в списке, открывать список
34. v быть больше35. v превосходить, быть первым36. v покрывать, подкрашивать37. v с. -х. производить подкормку38. v спорт. ударять сверхуtop down approach — подход "сверху вниз"
39. v с. -х. покрыватьand to top it all — и в довершение всего; вдобавок ко всем несчастьям
40. n волчокthe top sleeps — волчок вертится так, что вращение незаметно
peg top — кубарь, волчок
whipping top — юла, кубарь, волчок
Синонимический ряд:1. excellent (adj.) A1; bang-up; banner; blue-ribbon; bully; capital; champion; classic; classical; excellent; famous; fine; first-class; first-rate; first-string; five-star; front-rank; Grade A; great; number one; par excellence; prime; quality; royal; skookum; sovereign; splendid; stunning; superb; superior; tiptop; topflight; top-notch; whiz-bang2. first (adj.) best; cardinal; celebrated; chief; dominant; eminent; first; foremost; key; leading; main; major; outstanding; paramount; pre-eminent; premier; primary; prime; principal; superior3. fore (adj.) fore; front; head; lead4. highest (adj.) apical; greatest; highest; loftiest; topmost; upper; uppermost5. ultimate (adj.) maximal; maximum; outside; topmost; ultimate; utmost6. best (noun) best; choice; cream; elite; fat; flower; pick; pride; prime; primrose; prize7. cap (noun) cap; cork; lid; stopper8. face (noun) face; superficies; surface9. leader (noun) captain; chief; head; leader10. peak (noun) acme; apex; crest; crown; fastigium; peak; pinnacle; roof; summit; vertex; zenith11. cap (verb) cap; complete; cover; crest; crown; surmount; top off12. prune (verb) crop; detruncate; lop; pollard; prune; truncate13. surpass (verb) beat; best; better; cob; ding; eclipse; exceed; excel; outdo; outgo; outmatch; outshine; outstrip; overshadow; pass; surpass; transcend; trumpАнтонимический ряд:bottom; least; lowest; nadir; second-rate; worst -
4 higher-level module
stackable module — " этажерочный " модуль
-
5 top module
Большой англо-русский и русско-английский словарь > top module
-
6 higher-level module
English-Russian dictionary of computer science and programming > higher-level module
-
7 top module
English-Russian dictionary of computer science and programming > top module
-
8 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
9 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
10 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
11 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
12 higher-level
13 MTU
- терминал измерительных приборов
- оконечный блок технического обслуживания
- максимальный размер транспортного блока
- максимальный размер передаваемого блока данных
- максимальный размер передаваемого блока
- максимальный передаваемый модуль данных
- максимальный передаваемый блок
- диспетчерский пункт управления (в SCADA)
- блок магнитной ленты
блок магнитной ленты
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
диспетчерский пункт управления
диспетчерский пункт
ДП
главный терминал
-
[Интент]Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
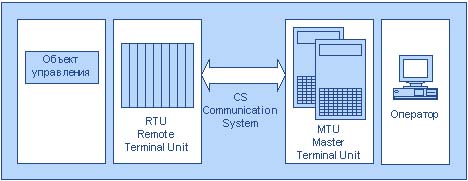
Рис. 2. Основные структурные компоненты SCADA-системыГлавной тенденцией развития MTU (диспетчерских пунктов управления) является переход большинства разработчиков SCADA-систем на архитектуру клиент-сервер, состоящую из 4-х функциональных компонентов.
1. User (Operator) Interface (интерфейс пользователя/оператора) исключительно важная составляющая систем SCADA. Для нее характерны
а) стандартизация интерфейса пользователя вокруг нескольких платформ;
б) все более возрастающее влияние Windows NT;
в) использование стандартного графического интерфейса пользователя (GUI);
г) технологии объектно-ориентированного программирования: DDE, OLE, Active X, OPC (OLE for Process Control), DCOM;
д) стандартные средства разработки приложений, наиболее популярные среди которых, Visual Basic for Applications (VBA), Visual C++;
е) появление коммерческих вариантов программного обеспечения класса SCADA/MMI для широкого спектра задач. Объектная независимость позволяет интерфейсу пользователя представлять виртуальные объекты, созданные другими системами. Результат расширение возможностей по оптимизации HMI-интерфейса.
2. Data Management (управление данными) - отход от узкоспециализированных баз данных в сторону поддержки большинства корпоративных реляционных баз данных (Microsoft SQL, Oracle). Функции управления данными и генерации отчетов осуществляются стандартными средствами SQL, 4GL; эта независимость данных изолирует функции доступа и управления данными от целевых задач SCADA, что позволяет легко разрабатывать дополнительные приложения по анализу и управлению данными.
3. Networking & Services (сети и службы) - переход к использованию стандартных сетевых технологий и протоколов. Службы сетевого управления, защиты и управления доступом, мониторинга транзакций, передачи почтовых сообщений, сканирования доступных ресурсов (процессов) могут выполняться независимо от кода целевой программы SCADA, разработанной другим вендором.
4. Real-Time Services (службы реального времени) - освобождение MTU от нагрузки перечисленных выше компонентов дает возможность сконцентрироваться на требованиях производительности для задач реального и квази-реального времени. Данные службы представляют собой быстродействующие процессоры, которые управляют обменом информацией с RTU и SCADA-процессами, осуществляют управление резидентной частью базы данных, оповещение о событиях, выполняют действия по управлению системой, передачу информации о событиях на интерфейс пользователя (оператора).
[ http://www.mka.ru/?p=41524]Тематики
Синонимы
EN
максимальный передаваемый блок
Наибольший блок данных, который может быть передан через данную физическую среду с использованием данного протокола.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
максимальный передаваемый модуль данных
Максимально возможный модуль данных, который можно передать через данную физическую среду. Пример: MTU для Ethernet составляет 1500 байт. См. также fragmentation.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
максимальный размер передаваемого блока
Максимальный размер области полезной нагрузки GFP в октетах (МСЭ-T G.7041/ Y.1303).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
максимальный размер передаваемого блока данных
Максимально возможный модуль данных, который можно передать через данную физическую среду. Пример: MTU для Ethernet составляет 1500 байт. См. также fragmentation.
[ http://www.morepc.ru/dict/]Тематики
EN
максимальный размер транспортного блока
(МСЭ-Т Y.1415).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
оконечный блок технического обслуживания
(МСЭ-Т G.991.2).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
терминал измерительных приборов
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > MTU
14 HLP
1) Военный термин: heavy-lift pontoon, helicopter, light, personnel2) Шутливое выражение: Hey Lookie Panic3) Сокращение: helper4) Вычислительная техника: протокол высокого уровня, High Latency Profile (Video, AVC)5) Сетевые технологии: high-level protocol, протокол высокого уровня НМД модуль хост-адаптера6) Полимеры: heterogeneous latex particle7) Расширение файла: Program online help information, Help file15 RXAMCO
модуль приемной антенны и многоканальный ответвитель (BTSE). В нем происходит усиление принятого сигнала со снижением уровня шума и разделение сигнала на четыре тракта обработки и один выходной сигнал высокого уровня.Англо-русский cловарь терминов и сокращений по мобильной радиосвязи стандарта GSM > RXAMCO
16 higher-level module
Вычислительная техника: модуль более высокого уровня17 father card
объединительная плата; плата более высокого уровняmemory card — плата памяти; плата запоминающего устройства
gate/flip-flop card — плата с последовательностной логикой
card module — ячейка; типовой элемент замены; модуль платы
18 component
- составляющий элемент
- компонента
- компонент огнеупора
- компонент клея
- компонент (металлургия)
- компонент (в информационных технологиях)
- компонент (в гидросистеме)
- компонент
- комплектующее изделие
компонент
-
[IEV number 151-11-21]EN
component
constituent part of a device which cannot be physically divided into smaller parts without losing its particular function
[IEV number 151-11-21]FR
composant, m
partie constitutive d'un dispositif ne pouvant être fractionnée matériellement sans perdre sa fonction particulière
[IEV number 151-11-21]Тематики
- электротехника, основные понятия
EN
DE
FR
компонент
Часть, блок или сборочная единица, выполняющая определенную функцию в гидросистеме.
Примечание - Данное определение отличается от приведенного в ИСО 5598, поскольку включает соединители, трубы и шланги, которые исключены из определения ИСО 5598.
[ГОСТ ИСО / ТО 10949- 2007]Тематики
EN
компонент (в информационных технологиях)
Общий термин, который используется для обозначения одной части чего-либо более сложного. Например, компьютерная система может быть компонентом ИТ-услуги, приложение может быть компонентом единицы релиза. Компоненты, которые необходимо контролировать, должны быть конфигурационными единицами.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
component
A general term that is used to mean one part of something more complex. For example, a computer system may be a component of an IT service; an application may be a component of a release unit. Components that need to be managed should be configuration items.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
EN
компонент
1. Один из элементов или соединений используемых для определения химической (или сплавляемой) системы, включая все фазы из числа возможных составов.
2. Одна из индивидуальных частей вектора, имеющая отношение к системе координат.
3. Индивидуальный функциональный элемент в физически независимой совокупности, который не может быть далее уменьшен или разделен без того, чтобы не нарушить его функции, например резистор, конденсатор, диод или транзистор.
[ http://www.manual-steel.ru/eng-a.html]Тематики
EN
компонент огнеупора
Вещество, входящее в состав огнеупора или шихты.
[ ГОСТ Р 52918-2008]Тематики
EN
компонента
слагающая составляющая
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
3.1 компонент (component): Часть, блок или сборочная единица, выполняющая определенную функцию в гидросистеме.
Примечание - Данное определение отличается от приведенного в ИСО 5598, поскольку включает соединители, трубы и шланги, которые исключены из определения ИСО 5598.
3.3 комплектующее изделие (component): Деталь, сборочная единица или сырье, являющиеся составной частью сборки более высокого уровня.
Источник: ГОСТ Р ИСО 22742-2006: Автоматическая идентификация. Кодирование штриховое. Символы линейного штрихового кода и двумерные символы на упаковке продукции оригинал документа
3.37 компонент (component): Элемент, рассматриваемый на самом низком уровне анализа системы.
Источник: ГОСТ Р 51901.6-2005: Менеджмент риска. Программа повышения надежности оригинал документа
3.3 компонент (component): Элемент, рассматриваемый на самом низком иерархическом уровне при анализе системы.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.4 компонент (component): Любое изделие, имеющее существенное значение для безопасного функционирования оборудования и защитных систем, но не имеющее автономной функции.
3.6 компонент (component): Часть системы, которая поставляется изготовителем в готовом для продажи виде с упаковкой, маркировкой и сопроводительной информацией от изготовителя.
Примечание - Привязи и соединительные элементы являются примерами компонентов системы.
3.2 компонент (component): Часть системы, которая поставляется изготовителем в готовом для продажи виде с упаковкой, маркировкой и информацией, предоставляемой изготовителем.
Примечание - Привязи для удержания и позиционирования (включая поясные ремни) и стропы являются примерами компонентов систем. [ЕН 363:2002]
2.2 компонент (component): Часть системы, которая поставляется изготовителем в готовом для продажи виде с упаковкой, маркировкой и инструкцией по применению.
Примечание - Страховочная привязь и строп являются примерами компонентов системы.
3.2 компонент (component): Часть системы, которая поставляется изготовителем в готовом для продажи виде с упаковкой, маркировкой и инструкцией по применению.
Примечание - Страховочная привязь и строп являются примерами компонентов системы. [ЕН 363: 1992]
3.3 компонент (component): Составная часть газовой смеси, оказывающая влияние на служебные свойства и характеристики газовой смеси (например, в смеси, содержащей 11 % СО2 в аргоне, СО2 считают компонентом, а аргон - основным газом).
Источник: ГОСТ Р ИСО 14175-2010: Материалы сварочные. Газы и газовые смеси для сварки плавлением и родственных процессов оригинал документа
3.6 компонент (component): Сущность системы с дискретной структурой в рамках системы, которая взаимодействует с другими компонентами системы, дополняя тем самым систему свойствами и характеристиками на ее самом нижнем уровне.
[ИСО/МЭК 15288:2002]
Источник: ГОСТ Р ИСО 19439-2008: Интеграция предприятия. Основа моделирования предприятия оригинал документа
3.9 компонент (component): Одна из частей, из которых состоит система; компонент может представлять собой часть оборудования или программного обеспечения и может сам состоять из других компонентов.
[IEEE 610] [1]
Примечание 1 - См. также «система контроля и управления», «оборудование».
Примечание 2 - Термины «оборудование», «компонента» и «модуль» часто используют как взаимозаменяемые. Отношение между этими терминами пока не стандартизовано.
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
3.1.6 составляющий элемент (component): Основная часть главной или заземляющей цепи КРУЭ, которая выполняет особую функцию (например, выключатель, разъединитель, выключатель нагрузки, предохранитель, измерительный трансформатор, ввод, шинопровод и т.д.).
Источник: ГОСТ Р 54828-2011: Комплектные распределительные устройства в металлической оболочке с элегазовой изоляцией (КРУЭ) на номинальные напряжения 110 кВ и выше. Общие технические условия оригинал документа
3.44 компонент (component): Сущность системы с дискретной структурой в рамках системы, которая взаимодействует с другими компонентами системы, дополняя тем самым систему свойствами и характеристиками на ее самом нижнем уровне.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > component
19 switching technology
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Англо-русский словарь нормативно-технической терминологии > switching technology
20 SPD
устройство защиты от импульсных перенапряжений
УЗИП
Устройство, которое предназначено для ограничения переходных перенапряжений и отвода импульсных токов. Это устройство содержит по крайней мере один нелинейный элемент.
[ ГОСТ Р 51992-2011( МЭК 61643-1: 2005)]
устройство защиты от импульсных разрядов напряжения
Устройство, используемое для ослабления действия импульсных разрядов перенапряжений и сверхтоков ограниченной длительности. Оно может состоять из одного элемента или иметь более сложную конструкцию. Наиболее распространенный тип SPD - газонаполненные разрядники.
(МСЭ-Т K.44, МСЭ-Т K.46, МСЭ-Т K.57,, МСЭ-Т K.65, МСЭ-Т K.66)
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]См. также:
- импульсное перенапряжение
-
ГОСТ Р 51992-2011( МЭК 61643-1: 2005)
Устройства защиты от импульсных перенапряжений низковольтные.
Часть 1. Устройства защиты от импульсных перенапряжений в низковольтных силовых распределительных системах.
Технические требования и методы испытаний
КЛАССИФИКАЦИЯ (по ГОСТ Р 51992-2011( МЭК 61643-1: 2005))
-
По числу вводов:
-
По способу выполнения защиты от перенапряжения:
-
По испытаниям УЗИП
-
По местоположению:
- внутренней установки
-
наружной установки.
Примечание - Для УЗИП, изготовленных и классифицируемых исключительно для наружной установки и монтируемых недоступными, вообще не требуется соответствия требованиям относительно защиты от воздействующих факторов внешней среды
-
По доступности:
- доступное
-
недоступное
Примечание - Недоступное означает невозможность доступа без помощи специального инструмента к частям, находящимся под напряжением
-
По способу установки
-
По местоположению разъединителя УЗИП:
- внутренней установки
- наружной установки
- комбинированной (одна часть внутренней установки, другая - наружной установки)
-
По защитным функциям:
- с тепловой защитой
- с защитой от токов утечки
- с защитой от сверхтока.
-
По защите от сверхтока:
- По степени защиты, обеспечиваемой оболочками согласно кодам IP
-
По диапазону температур
-
По системе питания
- переменного тока частотой от 48 до 62 Гц
- постоянного тока
- переменного и постоянного тока;
ВОПРОС: ЧТО ТАКОЕ ТИПЫ И КЛАССЫ УЗИП ?
Согласно классификации ГОСТ, МЭК а также немецкого стандарта DIN, Устройства Защиты от Импульсных Перенапряжений УЗИП делятся на разные категории по методу испытаний и месту установки.
Класс 1 испытаний соответствует Типу 1 и Классу Требований B
Класс 2 испытаний соответствует Типу 2 и Классу Требований C
Класс 3 испытаний соответствует Типу 3 и Классу Требований D
ВОПРОС: ЧЕМ УЗИП ТИП 1 ОТЛИЧАЕТСЯ ОТ УЗИП ТИП 2?
УЗИП тип 1 устанавливаются на вводе в здание при воздушном вводе питания или при наличии системы внешней молниезащиты. УЗИП в схеме включения предназначен для отвода части прямого тока молнии. В соответствии с ГОСТ Р 51992-2002, УЗИП 1-го класса испытаний ( тип 1) испытываются импульсом тока с формой волны 10/350 мкс.
УЗИП тип 2 служат для защиты от наведённых импульсов тока и устанавливаются либо после УЗИП тип 1, либо на вводе в здание при отсутствии вероятности попадания части тока молнии. УЗИП 2 класса испытаний (тип 2) испытываются импульсом тока с формой 8/20 мкс.
ВОПРОС: ГДЕ ПРИМЕНЯЕТСЯ УЗИП ТИПА 3 ?
Устройства для Защиты от Импульсных Перенапряжений Типа 3 предназначены для "тонкой" защиты наиболее ответственного и чувствительного электрооборудования, например медицинской аппаратуры, систем хранения данных и пр. УЗИП Типа 3 необходимо устанавливать не далее 5 метров по кабелю от защищаемого оборудования. Модификации УЗИП Типа 3 могут быть выполнены в виде адаптера сетевой розетки или смонтированы непосредственно в корпусе или на шасси защищаемого прибора. Для бытового применения доступна версия MSB06 скрытого монтажа, за обычной сетевой розеткой.ВОПРОС: ЗАЧЕМ НУЖЕН СОГЛАСУЮЩИЙ ДРОССЕЛЬ?
Для правильного распределения мощности импульса между ступенями защиты ставят линию задержки в виде дросселя индуктивностью 15 мкГн или отрезок кабеля длиной не менее 15 м, имеющего аналогичную индуктивность. В этом случае сначала сработает УЗИП 1-го класса и возьмёт на себя основную энергию импульса, а затем устройство 2-го класса ограничит напряжение до безопасного уровня.ВОПРОС: ЗАЧЕМ СТАВИТЬ УЗИП, ЕСЛИ НА ВВОДЕ УЖЕ СТОИТ АВТОМАТ ЗАЩИТЫ И УЗО?
Вводной автомат (например на 25, 40, 63 А) защищает систему электроснабжения от перегрузки и коротких замыканий со стороны потребителя. Устройство защитного отключения УЗО (например, с током отсечки 30 или 100 мА) защищает человека от случайного поражения электрическим током.
Но ни одно из этих устройств не может защитить электрическую сеть и оборудование от микросекундных импульсов большой мощности. Такую защиту обеспечивает только Устройство Защиты от Импульсных Перенапряжений УЗИП со временем срабатывания в наносекундном диапазоне.ВОПРОС: КАКОЕ УСТРОЙСТВО ЛУЧШЕ ЗАЩИТИТ ОТ ГРОЗЫ: УЗИП ИЛИ ОПН ?
УЗИП - это официальное (ГОСТ) наименование всего класса устройств для защиты от последствий токов молний и импульсных перенапряжений в сетях до 1000 В. В литературе, в публикациях в интернете до сих пор встречаются названия - ОПН (Ограничитель перенапряжения), Разрядник, Молниеразрядник, Грозоразрядник - которые применительно к сетям до 1000 Вольт означают по сути одно устройство - это УЗИП. Для организации эффективной молниезащиты необходимо обращать внимание не на название устройства, а на его характеристики.ВОПРОС: КАК СРАВНИТЬ УЗИП РАЗНЫХ ПРОИЗВОДИТЕЛЕЙ?
Все УЗИП, продаваемые на территории России, должны производиться и испытываться в соответствии с ГОСТ Р 51992-2002( аналог международного стандарта МЭК 61643-1-98). ГОСТ Р 51992-2002 предусматривает наличие у каждого устройства ряда характеристик, которые производитель обязан указать в паспорте и на самом изделии.
Класс испытаний (Тип) 1, 2 или 3
Импульсный ток Iimp (10/350 мкс) для УЗИП 1 класса
Номинальный импульсный ток In (8/20 мкс)
Максимальный импульсный ток Imax (8/20 мкс)
Уровень напряжения защиты Up, измеренный при In
По этим характеристикам и происходит сравнение. Замечание: некоторые производители указывают значения импульсных токов на фазу (модуль), а другие - на устройство в целом. Для сравнения их надо приводить к одному виду.[ http://www.artterm-m.ru/index.php/zashitaseteji1/faquzip]
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ УСТРОЙСТВ ЗАЩИТЫ ОТИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ В НИЗКОВОЛЬТНЫХ СИЛОВЫХ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЯХЗОРИЧЕВ А.Л.,
заместитель директора
ЗАО «Хакель Рос»
В предыдущих номерах журнала были изложены теоретические основы применения устройств защиты от импульсных перенапряжений (УЗИП) в низковольтных электрических сетях. При этом отмечалась необходимость отдельного более детального рассмотрения некоторых особенностей эксплуатации УЗИП, а также типовых аварийных ситуаций, которые могут возникнуть при этом.
1. Диагностика устройств защиты от перенапряженияКонструкция и параметры устройств защиты от импульсных перенапряжения постоянно совершенствуются, повышается их надежность, снижаются требования по техническому обслуживанию и контролю. Но, не смотря на это, нельзя оставлять без внимания вероятность их повреждения, особенно при интенсивных грозах, когда может произойти несколько ударов молнии непосредственно в защищаемый объект или вблизи от него во время одной грозы. Устройства защиты, применяемые в низковольтных электрических сетях и в сетях передачи информации подвержены так называемому старению (деградации), т.е. постепенной потере своих способностей ограничивать импульсные перенапряжения. Интенсивнее всего процесс старения протекает при повторяющихся грозовых ударах в течении короткого промежутка времени в несколько секунд или минут, когда амплитуды импульсных токов достигают предельных максимальных параметров I max (8/20 мкс) или I imp (10/350 мкс) для конкретных типов защитных устройств.Повреждение УЗИП происходит следующим образом. Разрядные токи, протекающие при срабатывании защитных устройств, нагревают корпуса их нелинейных элементов до такой температуры, что при повторных ударах с той же интенсивностью (в не успевшее остыть устройство) происходит:
− у варисторов - нарушение структуры кристалла (тепловой пробой) или его полное разрушение;
− у металлокерамических газонаполненных разрядников (грозозащитных разрядников) - изменение свойств в результате утечки газов и последующее разрушение керамического корпуса;− у разрядников на основе открытых искровых промежутков -за счет взрывного выброса ионизированных газов во внутреннее пространство распределительного щита могут возникать повреждения изоляции кабелей, клеммных колодок и других элементов электрического шкафа или его внутренней поверхности. На практике известны даже случаи значительной деформации металлических шкафов, сравнимые только с последствиями взрыва ручной гранаты. Важной особенностью при эксплуатации разрядников этого типа в распределительных щитах является также необходимость повышения мер противопожарной безопасности.
По указанным выше причинам все изготовители устройств защиты от перенапряжения рекомендуют осуществлять их регулярный контроль, особенно после каждой сильной грозы. Проверку необходимо осуществлять с помощью специальных тестеров, которые обычно можно заказать у фирм, занимающихся техникой защиты от перенапряжений. Контроль, осуществляемый другими способами, например, визуально или с помощью универсальных измерительных приборов, в этом случае является неэффективным по следующим причинам:
− Варисторное защитное устройство может быть повреждёно, хотя сигнализация о выходе варистора из строя не сработала. Варистор может обладать искажённой вольтамперной характеристикой (более высокая утечка) в области токов до 1 мA (область рабочих токов при рабочем напряжении сети; настоящую область не возможно проверить с помощью обычно применяемых приборов). Проверка осуществляется минимально в 2-х точках характеристики, напр. при 10 и 1000 мкА, с помощью специального источника тока с высоким подъёмом напряжения (1 до 1,5 кВ).
− Металлокерамический газонаполненный (грозовой) разрядник - с помощью визуального контроля можно заметить только поврежденный от взрыва внешний декоративный корпус устройства (или его выводы). Что бы выяснить состояние самого разрядника необходимо разобрать внешний корпус, но даже при таком контроле практически нельзя обнаружить утечку его газового заряда. Контроль напряжения зажигания грозового разрядника с помощью обыкновенных измерительных приборов выполнить очень трудно, он осуществляется при помощи специализированных тестеров.
− Разрядник с открытым искровым промежутком - проверку исправной работы можно осуществить только после его демонтажа и измерения с помощью генератора грозового тока с характеристикой 10/350 мкс по заказу у изготовителя устройств для защиты от импульсных перенапряжений.
2. Защита от токов утечки и короткого замыкания в устройствах защиты от импульсных перенапряжений
Основным принципом работы устройства защиты от импульсных перенапряжений является выравнивание потенциалов между двумя проводниками, одним из которых является фазный (L) проводник, а другим нулевой рабочий (N) или (РЕN) проводник, т.е. устройство включается параллельно нагрузке. При этом, в случае выхода из строя УЗИП (пробой изоляции, пробой или разрушение нелинейного элемента) или невозможности гашения сопровождающего тока (в случае применения искровых разрядников или разрядников скользящего разряда) возможно возникновение режима короткого замыкания между данными проводниками, что может привести к повреждению электроустановки и даже возникновению пожара. Стандартами МЭК предусматривается два обязательных способа защиты электроустановок потребителя 220/380 В от подобного рода ситуаций.
2.1. Устройство теплового отключения в варисторных устройствах защиты от импульсных перенапряжений
Имеющееся в варисторных ограничителях перенапряжений устройство отключения при перегреве (тепловая защита), как правило, срабатывает в результате процесса старения варистора. Суть явления заключается в том, что при длительной эксплуатации, а также в результате воздействий импульсов тока большой амплитуды происходит постепенное разрушение p-n переходов в структуре варистора, что приводит к снижению значения такого важного параметра, как наибольшее длительно допустимое рабочее напряжение защитного устройства (максимальное рабочее напряжение) Uc. Этот параметр определяется для действующего напряжения электрической сети и указывается производителями защитных устройств в паспортных данных и, как правило, непосредственно на корпусе защитного устройства. Для примера: если на корпусе защитного устройства указано значение Uc = 275 В, это обозначает, что устройство будет нормально функционировать в электропитающей сети номиналом 220 В при увеличении действующего напряжения на его клеммах до 275 В включительно (значение взято с достаточным запасом при условии выполнения электроснабжающей организацией требований ГОСТ 13109 «Нормы качества электрической энергии в системах электроснабжения общего назначения»).
В результате «старения» варистора значение Uc снижается и в определенный момент времени может оказаться меньше чем действующее напряжение в сети. Это приведет к возрастанию токов утечки через варистор и быстрому повышению его температуры, что может вызвать деформацию корпуса устройства, проплавление фазными клеммами пластмассы и, в конечном итоге, короткое замыкание на DIN-рейку и даже пожар.
В связи с этим, для применения в электроустановках рекомендуются только те варисторные ограничители перенапряжения, которые имеют в своем составе устройство теплового отключения (терморазмыкатель). Конструкция данного устройства, как правило, очень проста и состоит из подпружиненного контакта, припаянного легкоплавким припоем к одному из выводов варистора, и связанной с ним системы местной сигнализации. В некоторых устройствах дополнительно применяются «сухие» контакты для подключения дистанционной сигнализации о выходе ограничителя перенапряжений из строя, позволяющие с помощью физической линии передавать информацию об этом на пульт диспетчера или на вход какой-либо системы обработки и передачи телеметрических данных. (См. рис. 1).
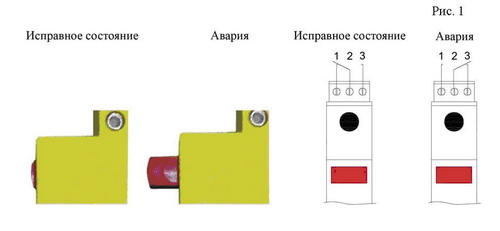
2.2. Применение быстродействующих предохранителей для защиты от токов короткого замыкания
Несколько другая ситуация возникает в случае установившегося длительного превышения действующего напряжения в сети над наибольшим длительно допустимым рабочим напряжением защитного устройства (Uc), определенным ТУ для данного УЗИП. Примером такой ситуации может быть повышение напряжения по вине поставщика электроэнергии или обрыв (отгорание) нулевого проводника при вводе в электроустановку (в трехфазной сети с глухозаземленной нейтралью трансформатора). Как известно, в последнем случае к нагрузке может оказаться приложенным межфазное напряжение 380 В. При этом устройство защиты от импульсных перенапряжений сработает, и через него начнет протекать ток. Величина этого тока будет стремиться к величине тока короткого замыкания (рассчитывается по общеизвестным методикам для каждой точки электроустановки) и может достигать нескольких сотен ампер. Практика показывает, что устройство тепловой защиты не успевает отреагировать в подобных ситуациях из-за инерционности конструкции. Варистор, как правило, разрушается в течение нескольких секунд, после чего режим короткого замыкания также может сохраняться через дугу (по продуктам разрушения и горения варистора). Как же как и в предыдущем случае, возникает вероятность замыкания клемм устройства на корпус шкафа или DIN-рейку при расплавлении пластмассы корпуса и возможность повреждения изоляции проводников в цепях включения защитных устройств. Сказанное выше относится не только к варисторным ограничителям, но и к УЗИП на базе разрядников, которые не имеют в своем составе устройства теплового отключения. На фотографии (рис. 2) показаны последствия подобной ситуации, в результате которой произошел пожар в распределительном щите.

Рис.2 Выход из строя варисторного УЗИП привел к пожару в ГРЩ.
На рисунке 3 показано варисторное УЗИП, которое в результате аварийной ситуации стало источником пожара в щите.
Рис.3
Для того чтобы предотвратить подобные последствия рекомендуется устанавливать последовательно с устройствами защиты от импульсных перенапряжений предохранители с характеристиками срабатывания gG или gL (классификация согласно требованиям стандартов ГОСТ Р 50339. 0-92 ( МЭК 60269-1-86) или VDE 0636 (Германия) соответственно).
Практически все производители устройств защиты от импульсных перенапряжений в своих каталогах приводят требования по номинальному значению и типу характеристики срабатывания предохранителей дополнительной защиты от токов короткого замыкания. Как уже указывалось выше, для этих целей используются предохранители типа gG или gL, предназначенные для защиты проводок и распределительных устройств от перегрузок и коротких замыканий. Они обладают значительно меньшим (на 1-2 порядка) временем срабатывания по сравнению с автоматическими выключателями тех же номиналов. При этом предохранители имеют более высокую стойкость к импульсным токам значительных величин. Практический опыт и данные экспериментальных испытаний показывают, что автоматические выключатели очень часто повреждаются при воздействии импульсных перенапряжений. Известны случаи подгорания контактов или приваривания их друг к другу. И в том и в другом случае автоматический выключатель не сможет в дальнейшем выполнять свои функции.
Возможны различные варианты применения предохранителей и, соответственно, существует ряд особенностей, которые необходимо учитывать еще на этапе проектирования схемы электроснабжения или при изготовлении щитовой продукции. Одна из таких особенностей заключается в том, что в случае, если в качестве защиты от токов короткого замыкания будет использоваться только общая защита (вводные предохранители), то при коротком замыкании в любом УЗИП (первой, второй или третьей ступени) всегда будет обесточиваться вся электроустановка в целом или какая-то ее часть. Применение предохранителей, включенных последовательно с каждым защитным устройством, исключает такую ситуацию. Но при этом встает вопрос подбора предохранителей с точки зрения селективности (очередности) их срабатывания. Решение этого вопроса осуществляется путем применения предохранителей тех типов и номиналов, которые рекомендованы производителем конкретных моделей устройств защиты от перенапряжений.
Пример установки предохранителей F7-F12 приведен на рисунке 4.

Рис.4 Установка защитных устройств в TN-S сеть 220/380 В
ПРИМЕР: При использовании в схеме, приведенной на рисунке 4, разрядников HS55 в первой ступени защиты и варисторных УЗИП PIII280 во второй ступени применение предохранителей F5-F7 и F8-F10 будет обусловлено выбором номинального значения предохранителей F1-F3:
· При значении F1-F3 более 315 А gG, значения F7-F9 и F10-F12 выбираются 315 А gG и 160 А gG соответственно;
· При значении F1-F3 менее 315 А gG, но более 160 А gG, предохранители F7-F9 можно не устанавливать, F10-F12 выбираются - 160 А gG;
· При значении F1-F3 менее 160 А gG, предохранители F7-F12 можно не устанавливать.
Иногда может потребоваться, чтобы в случае возникновения короткого замыкания в защитных устройствах не срабатывал общий предохранитель на вводе электропитающей установки. Для этого необходимо устанавливать в цепи каждого УЗИП предохранители с учетом коэффициента (1,6). Т.е. если предохранитель на входе электроустановки имеет номинальное значение 160 А gG, то предохранитель включенный последовательно с УЗИП должен иметь номинал 100 А gG.
Применение для данных целей автоматических выключателей осложняется причинами, перечисленными выше, а также не соответствием их времятоковых характеристик характеристикам предохранителей.
3. Часто встречающиеся недостатки в конструктивном исполнении устройств защиты от импульсных перенапряжений
Многими фирмами-производителями предлагаются защитные устройства классов I и II, состоящие из базы, предназначенной для установки на DIN-рейку, и сменного модуля с нелинейным элементом (разрядником или варистором) с ножевыми вставными контактами. Такое конструктивное исполнение кажется на вид более выгодным и удобным для заказчика, чем монолитный корпус, в виду возможности более простого осуществления измерения сопротивления изоляции электропроводки (при измерениях повышенными напряжениями этот модуль можно просто изъять). Однако способность сконструированных таким способом контактов пропускать импульсные токи не превышает предел Imax = 25 kA для волны (8/20 мкс) и Iimp = 20 kA для волны (10/350 мкс).
Несмотря на это, некоторые изготовители показывают в рекламных каталогах для таких защитных устройств максимальные разрядные способности величинами до Imax = 100 kA (8/20 мкс) или Iimp = 25 kA (10/350 мкс). К сожалению, это не подтверждается практическими данными. Уже при первом ударе испытательного импульса тока с такой амплитудой произойдут пережоги и разрушение не только ножевых контактов сменного модуля, но также и повреждение контактов клемм в базе. Разрушительное воздействие испытательного импульса тока Imax = 50 kA (8/20 мкс) на механическую часть такой системы и ножевой контакт показано на следующих фотографиях (рис. 5). Очевидно, что после такого воздействия сложным становится, собственно, сам вопрос извлечения вставки из базы, так как их контакты могут привариться друг к другу. Даже если вставку удастся отсоединить от базы, последнюю будет нельзя использовать далее из-за подгоревших контактов, которые приведут к резкому возрастанию переходного сопротивления и, соответственно, уровня защиты данного УЗИП.
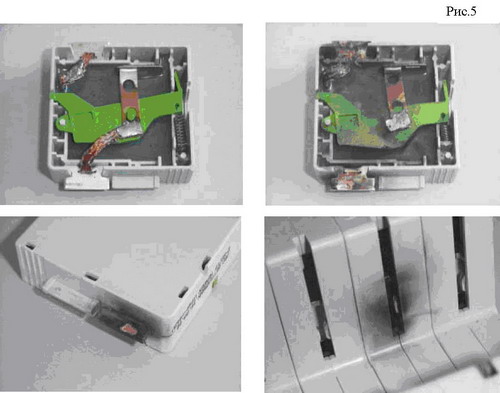
Для того чтобы избежать подобных последствий, защитные устройства модульной конструкции необходимо применять только тогда, когда существует гарантия, что ожидаемые импульсные воздействия не превысят указанных выше значений. Это может быть выполнено в случае правильного выбора типов и классов УЗИП для конкретной электроустановки и согласования их параметров между ступенями защиты.
4. Использование УЗИП для защиты вторичных источников питания
Одним из наиболее часто используемых вторичных источников питания является выпрямитель. Следует отметить, что практика установки элементов защиты от перенапряжений (разрядников, варисторов и т.п.) на платах или внутри блоков выпрямителя, является не правильной с нашей точки зрения. Существующий опыт показывает, что эти варисторы как правило рассчитаны на токи 7 – 10 кА (форма импульса 8/20 мкС) и по своим параметрам соответствуют третьему классу защиты согласно ГОСТ Р 51992-2002( МЭК 61643-1-98). Как правило, эксплуатирующие организации считают данный тип защиты достаточным и никаких дополнительных мер для повышения надежности работы оборудования не принимают. Однако, при отсутствии дополнительных внешних устройств защиты от импульсных перенапряжений более высокого класса, а так же при возникновении длительных превышений рабочего напряжения питающей сети в данной ситуации возможно возникновение двух типовых аварийных ситуаций:
a) Токи значительных величин, возникающие при срабатывании установленных внутри модуля варисторов, будут протекать по печатным проводникам плат или проводам внутри блоков выпрямителя по кратчайшему пути к заземляющей клемме стойки. Это может вызвать выгорание печатных проводников на платах и возникновению на параллельных незащищенных цепях наводок, которые в свою очередь приведут к выходу из строя электронных элементов блока выпрямителя. При превышении максимальных импульсных токов, определенных для данного варистора изготовителем, возможно, его возгорание и даже разрушение, что может привести к пожару и механическому повреждению самого выпрямителя (более подробно описано в п.п. 2.1).
b) Несколько другая ситуация возникает в случае длительного установившегося превышения действующего напряжения в сети над максимальным допустимым рабочим напряжением Uc, определенным ТУ для данного варистора (как правило используются варисторы с Uc = 275 В). Подробно данная ситуация была описана выше (см п.п. 2.2). В результате описанного воздействия появляется вероятность возгорания печатных плат и внутренней проводки, а так же возникновения механических повреждений (при взрыве варистора), что подтверждается статистикой организаций, осуществляющих ремонт выпрямителей.
Пример таких повреждений показан на рисунке 6.
Рис.6
С точки зрения решения проблем описанных в пункте (а), наиболее правильным является вариант установки защитных устройств, при котором они размещаются в отдельном защитном щитке или в штатных силовых и распределительных щитах электроустановки объекта. Применение внешних дополнительных устройств защиты позволяет защитить выпрямитель от импульсных перенапряжений величиной в сотни киловольт и соответственно снизить до допустимого (7 – 10 кА) значения величины импульсных токов, которые будут протекать через варисторы, встроенные в выпрямитель, или практически полностью исключить их.
Для защиты оборудования от длительного установившегося превышения действующего напряжения в сети (пункт b) можно использовать устройства контроля напряжения фазы или подобные им (см. рис. 7).
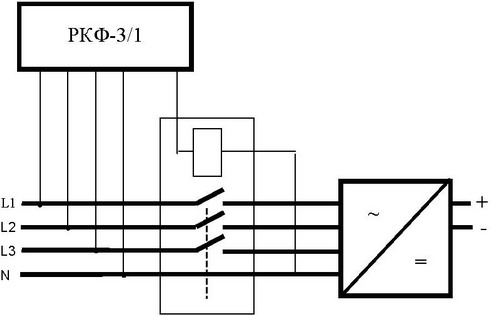
Рис. 7 Подключение устройства контроля фаз РКФ-3/1
[ http://www.energo-montage.ru/pages/top/articles/osobennosti_ekspluatacii_uzip/index_76.html]
Тематики
Синонимы
EN
3.33 устройство защиты от импульсных перенапряжений (surge protection device, SPD): Устройство, предназначенное для подавления кондуктивных перенапряжений и импульсных токов в линиях.
Источник: ГОСТ Р 51317.1.5-2009: Совместимость технических средств электромагнитная. Воздействия электромагнитные большой мощности на системы гражданского назначения. Основные положения оригинал документа
Англо-русский словарь нормативно-технической терминологии > SPD
Страницы- 1
- 2
См. также в других словарях:
Синхронный транспортный модуль — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ — (ГПМ) гибкая производственная система в виде единицы технологич. оборудования, оснащённая автоматизир. устройством программного управления и средствами автоматизации технологич. процесса, автономно функционирующая, осуществляющая многократные… … Большой энциклопедический политехнический словарь
Гибкий производственный модуль — – (ГПМ) – гибкая производственная система в виде единицы технологич. оборудования, оснащённая автоматизир. устройством программного управления и средствами автоматизации технологич. процесса, автономно функционирующая, осуществляющая… … Энциклопедия терминов, определений и пояснений строительных материалов
ГОСТ 26599-85: Системы передачи волоконно-оптические. Термины и определения — Терминология ГОСТ 26599 85: Системы передачи волоконно оптические. Термины и определения оригинал документа: 84. Акустооптический коммутационный прибор Оптический коммутационный прибор, в котором оптическая коммутация осуществляется за счет… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения — Терминология ГОСТ 19781 90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа: 9. Абсолютная программа Non relocatable program Программа на машинном языке, выполнение которой зависит от ее… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 54417-2011: Компоненты волоконно-оптических систем передачи. Термины и определения — Терминология ГОСТ Р 54417 2011: Компоненты волоконно оптических систем передачи. Термины и определения оригинал документа: 26 активная волоконно оптическая линия задержки; активная ВОЛЗ: Активный компонент ВОСП, предназначенный для задержки… … Словарь-справочник терминов нормативно-технической документации
Китайская Национальная Нефтегазовая корпорация — (CNPC) Китайская Национальная Нефтегазовая корпорация это одна из крупнейших нефтегазовых компаний мира Китайская Национальная Нефтегазовая корпорация занимается добычей нефти и газа, нефтехимическим производством, продажей нефтепродуктов,… … Энциклопедия инвестора
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
Компилятор — Эта статья включает описание термина «Компиляция»; см. также другие значения. Компилятор программа или техническое средство, выполняющее компиляцию.[1][2][3] Компиляция трансляция программы, составленной на исходном языке высокого… … Википедия
Недвижимость — (Real estate) Определение недвижимости, виды недвижимости, аренда и продажа недвижимости Информация о понятии недвижимость, виды недвижимости, аренда и продажа недвижимости, налогообложение и страхование Содержание – это вид имущества,… … Энциклопедия инвестора
Оберон (язык программирования) — У этого термина существуют и другие значения, см. Оберон. Oberon Класс языка: императивный, структурированный, модульный Появился в: 1986 Автор(ы) … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский